Traditional Machine Learning
传统机器学习方法
Tree
Single Tree
Decision Tree
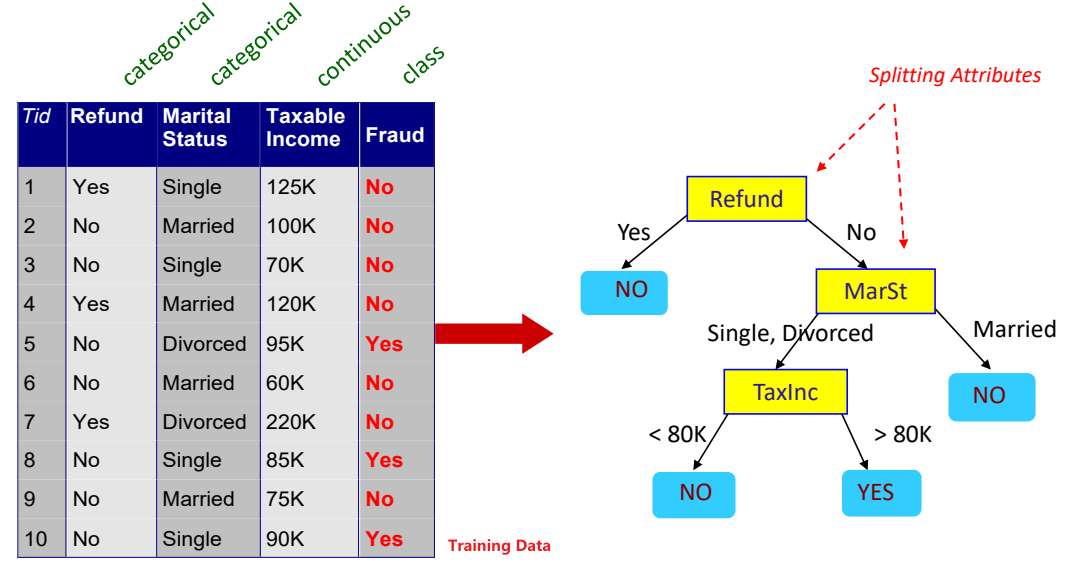
决策树重点:挑选重要的特征,越重要的特征放的越接近根节点。
ID3
ID3算法使用Information Gain信息增益作为挑选特征指标。
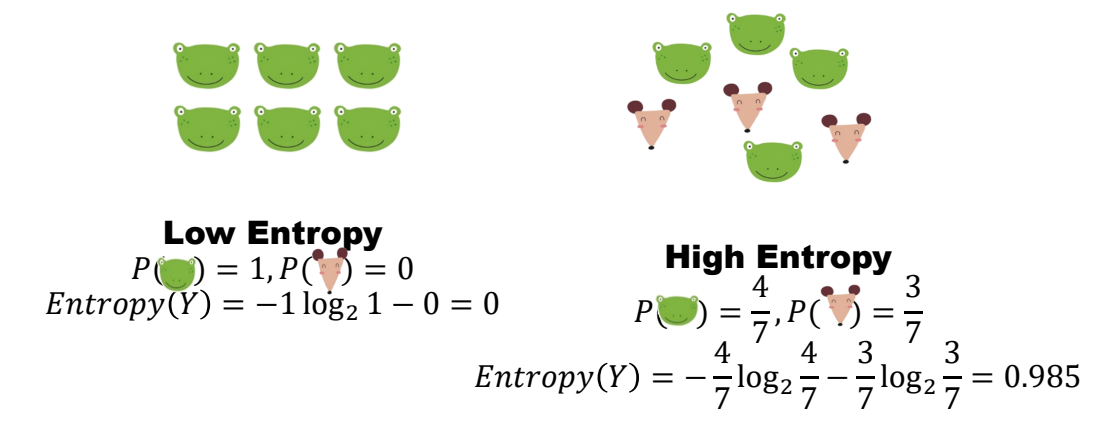
Entropy-熵
在数学与物理上,熵指混乱程度,或者说值得是变量X的自由度和不确定性。
在计算机理论中,熵度量给定数据中的杂质。 \[ Entropy(p)=\sum_{i=1}^C-p_i*log_2(p_i) \] c : 可能出现的种类数量
\(p_i\):第i类的概率
熵越小,数据越纯
example:
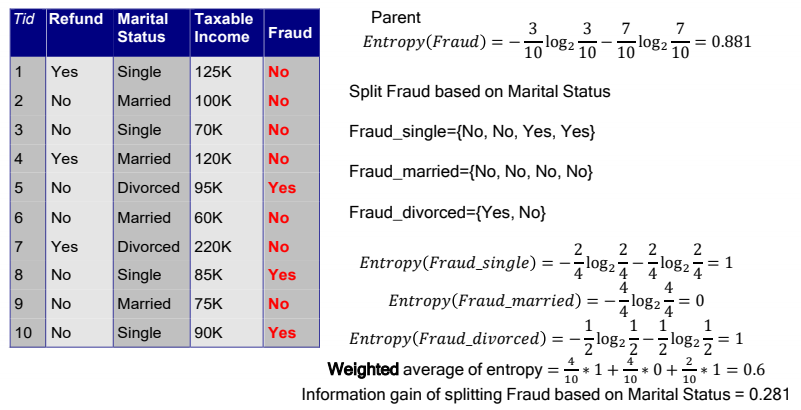
Information Gain
Information Gain计算拆分前后熵的变化,即用拆分特征前的熵减去拆分特征后的平均熵。 \[ Information Gain = Entropy(entire\_dataset)-\frac{1}{n}\sum_{i=1}^n Entropy(child\_dataset_i) \] 上面式子表示将整个数据集依照某个特征值拆分为了n个子数据集。
example:
有的教程会写作:熵减去条件熵
简单认识一下条件熵就好,起码知道词是个啥子意思嘛
熵是对事件结果不确定性的度量,但在知道有些条件时,不确定性会变小。这里的条件就是数据集中的特征。
条件熵就是已知某个特征X的情况下,事件Y的不确定性 \[ Entropy(Y|X)=\sum_{i=1}^np_i Entropy(Y|X=x_i) \] 就是特征X每个可能性的结果的熵乘以发生概率的求和。 \[ Information Gain = Entropy(Y)- Entropy(Y|X) \]
ID3缺点
- 没有剪枝策略,容易过拟合。
- 只能用于处理离散分布的特征。
- 没有考虑缺失值。
- InformationGain对可取数值数目较多的特征有所偏好,类似‘ID’的特征其信息增益接近于1。
C4.5
使用Information Gain Ratio信息增益率作为挑选指标,减少因特征值类别多导致信息增益大的问题。同时引入了剪枝策略。
Information Gain Ratio
\[ IGR = \frac{IG(feature,dataset)}{Entropy(feature)} \]
Entropy(feature): 特征的固有值,即是特征的纯度,(之前求得都是label的熵)公式如下: \[ Entropy_A(dataset) = -\sum_{i=1}^np_i*log_2(p_i) \] c : A中可能出现的种类数量
\(p_i\):A为第i类的概率
这能解决ID3的第四个缺点,特征可能类别越多(越细致),纯度低,熵越高,分母越大
剪枝策略
剪枝缓解决策树过拟合
预剪枝
生成决策树过程中剪枝
- 提前设定决策树的高度,当达到这个高度时,就停止构建决策树;
- 当达到某节点的实例具有相同的label,也可以停止树的生长;
- 提前设定某个阈值,当达到某个节点的样例个数小于该阈值的时候便可以停止树的生长,但这种方法的缺点是对数据量的要求较大,无法处理数据量较小的训练样例;
- 同样是设定某个阈值,每次扩展决策树后都计算其对系统性能的增益,若小于该阈值,则让它停止生长。
预剪枝的显著缺点是视野效果。因为剪枝是伴随着构建决策树同时进行的,构建者无法预知下一步可能会发生的事,会出现某种情况,在相同标准下,当前决策树不满足要求最开始的构建要求、构建者进行了剪枝,但实际上若进行进一步构建后、决策树又满足了要求。这种情况下,预剪枝会过早停止决策树的生长。
C4.5算法常选择后剪枝的方法消除决策树的过度拟合
后剪枝
在已经生成的决策树上剪枝
用递归的方式从低往上针对每一个非叶子节点,评估用一个叶子节点去代替这课子树是否有益。如果剪枝后与剪枝前相比其错误率是保持或者下降,则这棵子树就可以被替换掉。C4.5 通过训练数据集上的错误分类数量来估算未知样本上的错误率。
后剪枝决策树的欠拟合风险很小,泛化性能往往优于预剪枝决策树。但同时其训练时间会大的多。
优点
解决特征值类别多导致信息增益大的问题
引入剪枝
增加对连续特征值的处理:将连续特征离散化,假设 n 个样本的连续特征 A 有 m 个取值,C4.5 将其排序并取相邻两样本值的平均数共 m-1 个划分点,分别计算以该划分点作为二元分类点时的信息增益,并选择信息增益最大的点作为该连续特征的二元离散分类点;
增加对缺失值处理:
在特征值缺失的情况下进行划分特征的选择?(即如何计算特征的信息增益率)
C4.5 的做法是:对于具有缺失值特征,用没有缺失的样本子集占整个数据集的比重来折算;
选定该划分特征,对于缺失该特征值的样本如何处理?(即到底把这个样本划分到哪个结点里)
C4.5 的做法是:将样本同时划分到所有子节点。不过要调整样本的权重值,其实也就是以不同概率划分到不同节点中。
缺点
- 依然不能处理回归问题
- 使用的熵模型拥有大量耗时的对数运算,连续值还有排序运算;
- 用的是多叉树,用二叉树效率更高;
- 在构造树的过程中,对数值属性值需要按照其大小进行排序,从中选择一个分割点,所以只适合于能够驻留于内存的数据集,当训练集大得无法在内存容纳时,程序无法运行。
CART- classification and regression tree
CART是决策树的延伸,也可以看作特殊的决策树。他建立起来的是二叉树,而不是多叉树。
可以不仅可以解决分类问题,还可以觉得回归问题

Classification
特征挑选指标:Gini index
基尼系数越小,纯度越高,特征越好。
Gini值
Gini值反应了从数据集D中随机抽取两个样本,其类别不一样的概率。 \[ Gini(D) = \sum_{i=1}^np(x_i)*(1-p(x_i))=1-\sum_{i=1}^np(x_i)^2 \] \(p(x_i)\): \(x_i\)出现的概率
n:类别数量
分类树的构造
递归生成二叉树,以Gini值最小化作为准则。
遍历所有特征\(A\),遍历特征\(A\)所有的可能取值\(a\),根据特征A 是否取某一可能值a,把样本D分成两部分\(D_1\)和\(D_2\)。计算Gini值,将Gini值最小的\(A,a\)作为最优特征与最优切分点。 \[ D_1 = (x,y)\in D |A(x)=a,D_2 = D-D_1 \]
\[ Gini(D|A=a) = \frac{|D_1|}{|D|}Gini(D_1)+\frac{|D_2|}{|D|}Gini(D_2) \]
循环1步骤
Regression
递归生成二叉树,使用平方误差最小化作为准则。
假设有n个样本\(D={(x_1,y_1),(x_2,y_2),\cdots,(x_n,y_n)}\),其中x是d维向量,代表d个特征,y是连续值。
CART回归树生成算法:
遍历所有特征\(d_i\),遍历n个样本在\(d_i\)特征的取值x,取相邻两样本值x(排序后)的平均数s作为划分点,利用s作为划分两个区域的阈值: \[ R_1 = \{y_i|x_{i,d_i}<=s\},R_2 = \{y_i|x_{i,d_i}>s\} \] 每个区域内样本\(y_i\)的均值作为该区域的预测值\(c_1, c_2\),计算样本真实值和预测值的平方误差之和,并找到能使平方误差最小的\(d_i\)和\(s\): \[ c_1 = \frac{1}{n}\sum_{x_i\in R_1}y_i,c_2 = \frac{1}{n}\sum_{x_i\in R_2}y_i, \]
\[ \min_{d_i,s}\{\sum_{x_i\in R_1(d_i,s)}(y_i-c_1)^2+\sum_{x_i\in R_2(d_i,s)}(y_i-c_2)^2\} \]
重复1直到满足停止条件
最后划分为M区域\(R_1,R_2,\cdots,R_M\),生成决策树,预测值为: \[ f(x)=\sum_{i=1}^Mc_iI(x\in R_i) \] 这里的\(I(x\in R_i)\)值,满足条件返回值为1,否则为0
Several tree
Bagged Decision Tree
单棵的决策树高方差(不同训练集训练的预测结果差很多,不稳定),Bagged Decisoin Tree要解决这个问题。
使用Bootstrap生成多个训练集。它基于有放回地从原始训练数据集中抽取样本,构成一个新的训练集。通过对原始数据集的多次重采样,可以生成多个不同的训练集,每个训练集都是原始数据集的一部分。接着将每轮未抽取的数据合并形成袋外数据集(Out of Bag, OOB),用于模型中的测试集。
使用Bagging进行训练和预测。通过在 Bootstrap 生成的多个训练集上训练多个独立的基础模型,并将它们的预测结果进行平均或投票来进行最终预测。每个基础模型都是独立训练的,它们之间没有依赖关系。Bagging 可以减少模型的方差,提高模型的稳定性和泛化能力。
Random Forest
随机森林使用的方法与Bagged Decision Tree一样使用Bootstrap和Bagging方法,但做出了改进。
决策树使用的是贪心策略,每一步都是局部最优解,但每次的局部最优解不一定能得到全局最优解。而且Bagging后,我们可能会得到几个非常相似的局部最优解树。
所以随机森林加入随机策略,鲁棒性会更强。
构建随机森林
- 使用Bootstrap策略,有放回的抽取sample生成N个训练集,每个训练集可以训练出一个子模型。
- 训练单棵决策树
- 每个sample有M个特征,在决策树的每个节点需要分裂的时候,随机从M个特种中选取m个特征,满足条件m << M。然后从这m个属性中采用某种策略(比如说信息增益)来选择1个属性作为该节点的分裂属性。(这样让决策树不要过分关心一个重要特征,鲁棒性更强)
- 循环1步骤
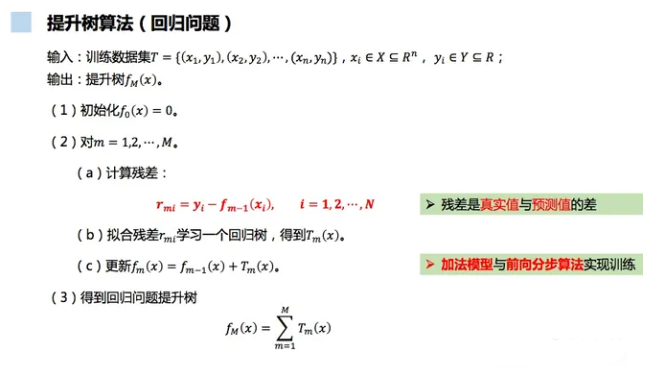
GBDT
使用Boosting思想,以决策树为基函数的提升方法称为提升决策树。保证每棵树都是低方差,高偏差。
GBDT的原理、公式推导、Python实现、可视化和应用 - 知乎 (zhihu.com)
算法
! ]
]